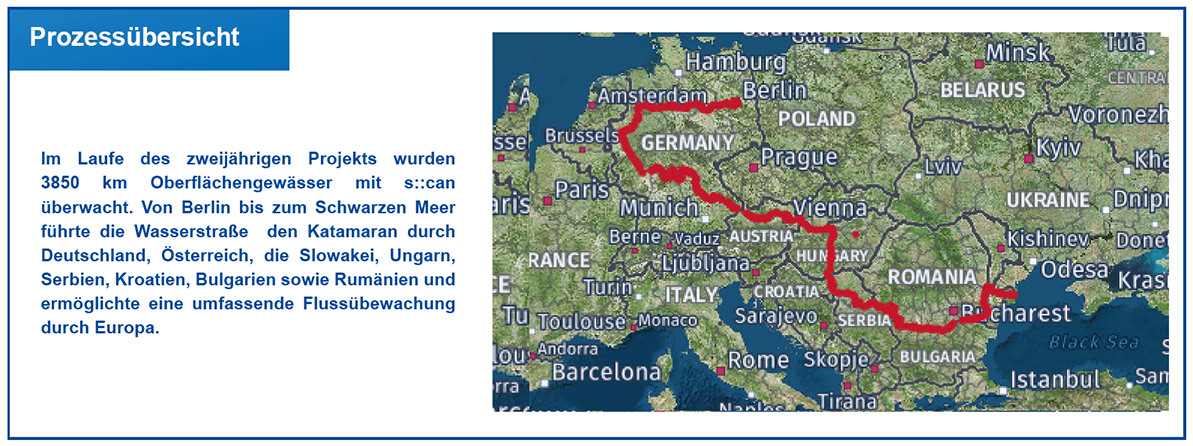
Der Forscher Carsten Riechelmann reiste auf seinem selbstgebauten und mit einem s::can System zur Georeferenzierung der Messdaten ausgestatteten Katamaran durch Europa. Längskontinuierliche Profile aller Parameter wurden erfasst und in Echtzeit in Online-Karten dargestellt.
3850 km lange Flussüberwachung von Berlin bis ans Schwarze Meer – mit s::can

Hintergrund
Hintergrund
Der deutsche Wasseringenieur Carsten Riechelmann baute mit Hilfe von 90 Freiwilligen aus 20 Nationen den Holzkatamaran Esperanto. Das Schiff sollte als Umweltbeobachtungsstation und gelegentlich als Eventbühne genutzt werden. Nach der Arbeit mit s::can Systemen in der Abwasserforschung erkannte Riechelmann, dass die hohe Messfrequenz des spectro::lyser für eine neue Form der dynamischen Überwachung des Oberflächenwassers genutzt werden konnte.
Herausforderung
Boote, die sich auf diversen Gewässern bewegen, könnten für die Erfassung von Daten über anthropogene Einflüsse eingesetzt werden. Wenn ein zuverlässiges Datenerfassungs- und Kalibrierungssystem entwickelt wird und die Daten offen zugänglich sind, wird die Wasserverschmutzung für die Öffentlichkeit transparent. Diese öffentliche Aufmerksamkeit kann dazu beitragen, den politischen Druck auf Personen oder Unternehmen zu erhöhen, die von der Einleitung von Schadstoffen profitieren.
s::cans Lösung
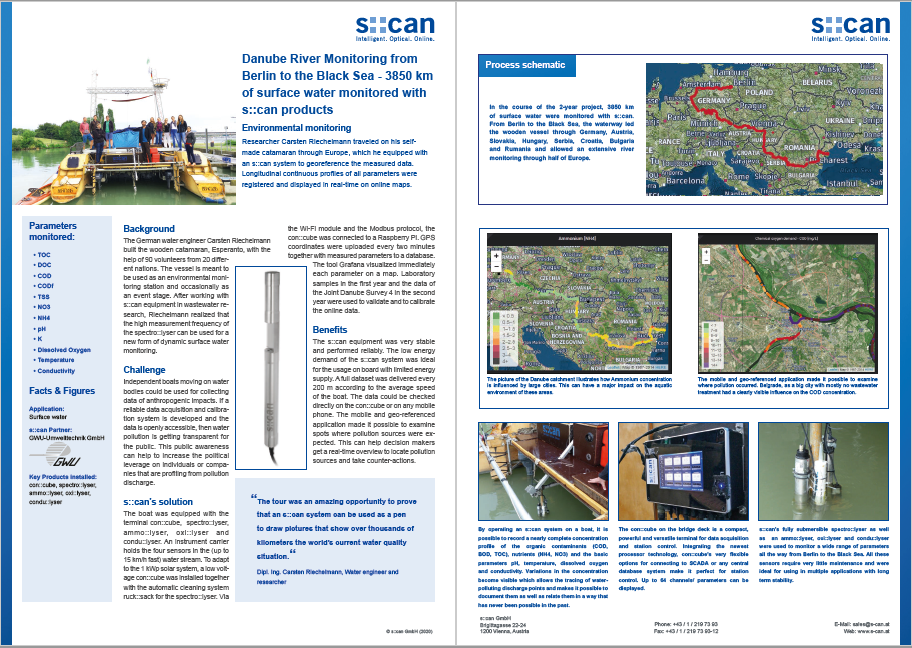
Das Boot wurde mit dem Bediengerät con::cube und den Sonden spectro::lyser, ammo::lyser, oxi::lyser und condu::lyser ausgestattet. Ein Instrumententräger diente zur Befestigung der vier Sensoren im bis zu 15 km/h schnellen Wasserstrom. Zur Anpassung an das 1 kWp-Solarsystem wurde ein niedervoltiger con::cube zusammen mit dem automatischen Reinigungssystem ruck::sack für den spectro::lyser installiert. Die Verbindung des con::cube mit einem Raspberry-PI erfolgte über ein Wi-Fi-Modul und Modbus-Protokoll. Die GPS-Koordinaten wurden alle zwei Minuten zusammen mit den gemessenen Parametern in eine Datenbank hochgeladen. Das Tool Grafana visualisierte umgehend jeden Parameter auf einer Karte. Laborproben des ersten Jahres und die Daten der Joint Danube Survey 4 im zweiten Jahr wurden zur Validierung und Kalibrierung der Online-Daten genutzt.

Vorteile
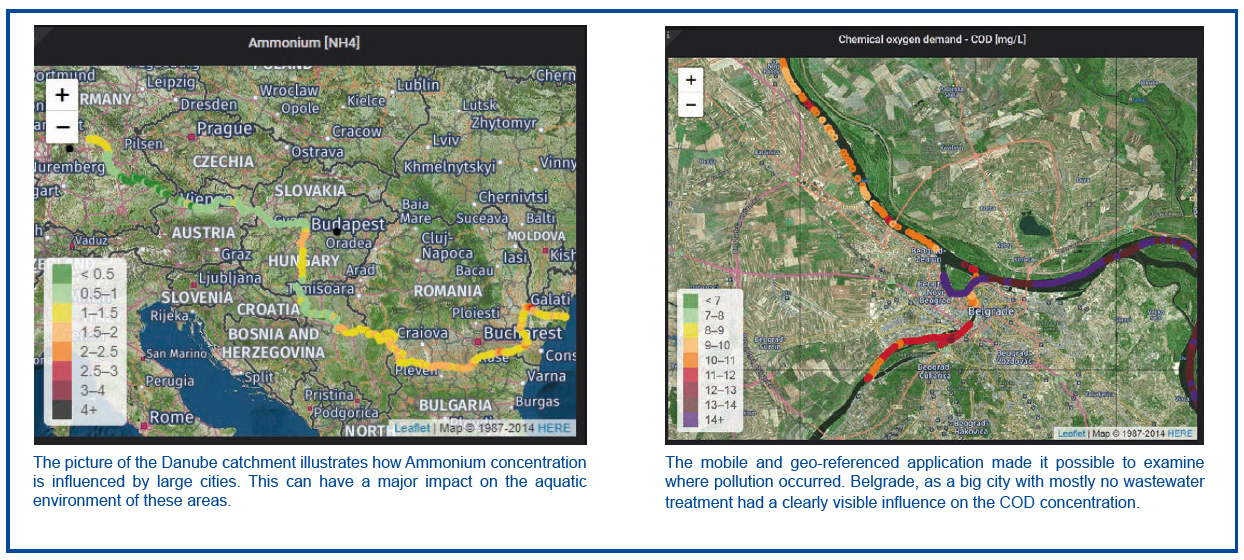
Die s::can Geräte arbeiteten sehr zuverlässig und stabil. Der geringe Energiebedarf des s::can Systems eignete sich ideal für den Einsatz an Bord mit begrenzter Energiezufuhr. Alle 200 m wurde ein vollständiger Datensatz entsprechend der Durchschnittsgeschwindigkeit des Bootes geliefert. Die Daten konnten jederzeit auf dem con::cube oder direkt auf jedem Handy abgerufen werden. Die mobile und georeferenzierte Anwendung ermöglichte die Untersuchung von Stellen, an denen Verschmutzungen erwartet wurden. Dies kann Entscheidungsträgern helfen, einen Echtzeit Überblickzu erhalten, um Verschmutzungsquellen zu lokalisieren und Gegenmaßnahmen zu ergreifen.
Ähnliche Beiträge
-
Operative Exzellenz erreichen –
Wie der pipe::scan die Überwachung der Wasserqualität verändert hat Das Union Water Supply System (UWSS), eine von der Ontario Clean Water Agency verwaltete Einrichtung, ist für die Versorgung von…
Das Union Water Supply System (UWSS), eine von der Ontario Clean Water Agency verwaltete Einrichtung, ist für die Versorgung von… -
Sommerpraktikum – Teil 1
 August 2023 I Wir haben unsere Ferialpraktikanten gebeten, uns mit einem kurzen Beitrag an ihren Erfahrungen und Eindrücken teilhaben zu…
August 2023 I Wir haben unsere Ferialpraktikanten gebeten, uns mit einem kurzen Beitrag an ihren Erfahrungen und Eindrücken teilhaben zu… -
Wings For Life World Run 2023
Mai 2023 I Am 7. Mai fand zum 10. Mal der Wings For Life World Run statt. Neun s::can-Läufer:innen stellten…


